乐白帮助
用户手册
用户手册
前言
产品信息
硬件操作
软件操作
位置和姿态
系统还原
维护和维修
服务与支持
开发指南
开发指南
选择开发方式
Docker 仿真
内置服务端口
SDK 外部控制
JSON-RPC 服务
Lua Socket 服务
ROS 开发
在新窗口打开
Modbus 从站
错误码
SDK
SDK
SDK 简介
安装使用 SDK
Lua SDK
初始化实例
系统控制
机器人配置
状态数据
程序控制
位置和姿态
运动
I/O 控制
串口通信
Modbus
夹爪
灯板
信号量
本地存储
Python SDK
Python SDK 简介
初始化连接
状态数据
机器人系统控制
运动
位置和位姿
夹爪
程序任务控制
IO控制
串口通讯
Modbus
机器人配置
灯板
信号量交互
API
API
Lua API
Lua 语言入门
常用方法
系统控制
机器人配置
状态数据
程序控制
协作式多任务
事件通知
位置和姿态
运动
控制箱 I/O
法兰盘 I/O
扩展 I/O
外置 I/O
串口通信
Modbus
夹爪
灯板
信号量
编程示例
编程示例
编程示例
Lua示例程序
Python 例程
串口通信示例
JavaScript 例程
常见问题
常见问题
机械臂运动指令有哪些
为什么直线运动总是报错
为什么要设置末端负载
如何手动控制碰撞检测
为什么没有示教器
新夹爪IO使用说明
夹爪安装说明
更新日志
更新日志
更新系统
L Master 3.1
L Master 3.0
L Master 2.4
L Master 2.3
L Master 2.2
L Master 2.1
L Master 2.0
L Master 1.2
资源
资源
GitHub
在新窗口打开
乐白官网
在新窗口打开
App应用通过jsonrpc快捷调用场景
Languages
Languages
zh-CN
en-US
Search
K
#
新夹爪IO使用说明
注意
仅限单独购买夹爪的用户参考!购买成品手臂的用户可以忽略。
乐白电动夹爪
LMG-90
在新窗口打开
。
#
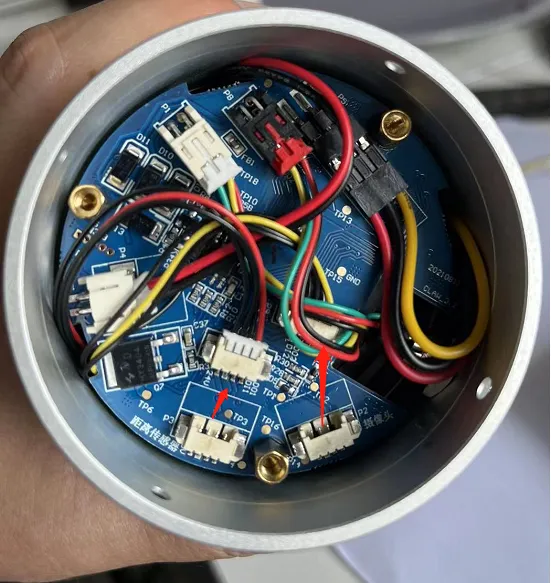
第一步,P3插头移到P10, P2插头移到P9,见下图
#
第二步,根据下图接口定义接线使用
为什么没有示教器
夹爪安装说明