位置和姿态
关节位置描述
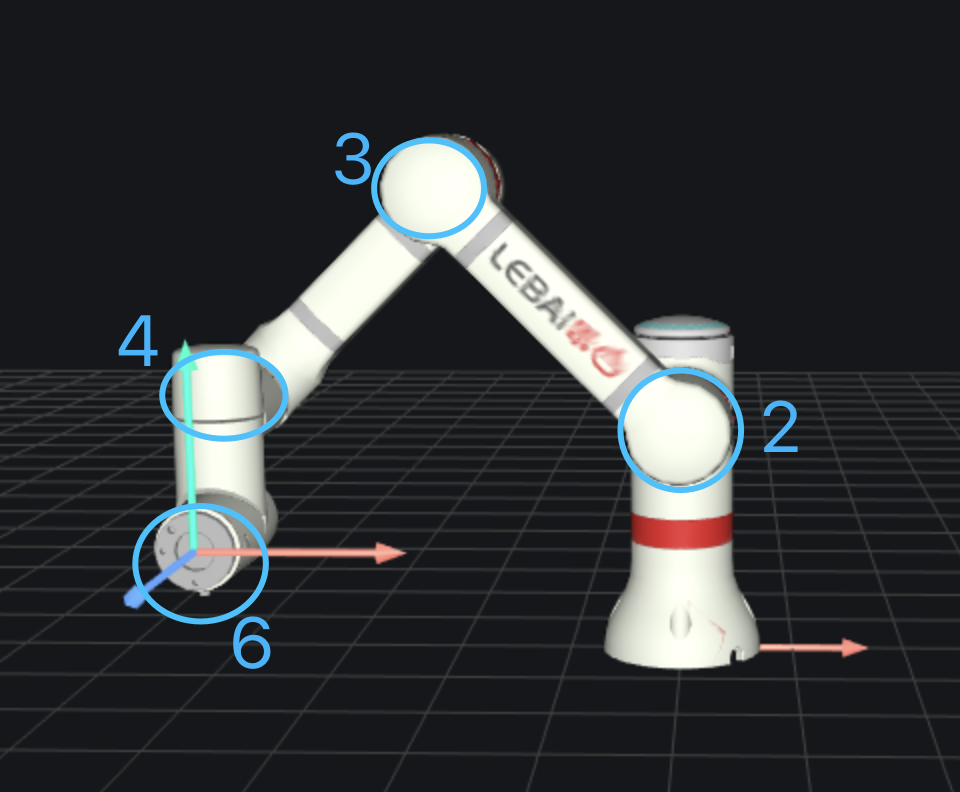
乐白机器人LM3为六轴(六个关节)机器人,每个关节的旋转量组成关节位置描述(简称关节位置),可以用六元组表示:
其中 表示第 i 个关节的旋转角度,单位为弧度(rad)。
在 Lua API 中,用指定索引键的关联数组表示。
在 Lua SDK 中,用数字顺序索引的数组表示。
例如对于关节位置
在 Lua API 中,可以表示为:
{j1=0.024, j2=math.rad(-15), j3=math.pi, j4=math.pi/2, j5=math.rad(30), j6=0}
在 Lua SDK 中,可以表示为:
{0.024, math.rad(-15), math.pi, math.pi/2, math.rad(30), 0}
可以使用lua_pose与sdk_pose实现Lua API与SDK的互转
关节描述的范围理论上是无限制的,具体的限制范围取决于具体的应用场景及可能产生的自干涉。
笛卡尔空间位姿描述
乐白机器人末端的笛卡尔位置和姿态(简称空间位置或位姿)用六元组表示:
其中 表示空间笛卡尔坐标位置,单位为米(m)。 表示旋转姿态,单位为弧度(rad)。
在 Lua API 中,用数字顺序索引的数组表示。
在 Lua SDK 中,用指定索引键的关联数组表示。
例如对于笛卡尔空间位姿
在 Lua API 中,可以表示为:
{0.2, 0, 0, math.pi/2, math.rad(30), 0.024}
在 Lua SDK 中,可以表示为:
{x=0.2, y=0, z=0, rz=math.pi/2, ry=math.rad(30), rx=0.024}
可以使用lua_pose与sdk_pose实现Lua API与SDK的互转
对于描述坐标系(位姿),我们用到如下描述:
- X-Y-Z固定角。首先将坐标系和已知参考坐标系重合。先将绕旋转角,再绕旋转角,最后绕旋转角。
- Z-Y-X欧拉角。首先将坐标系和已知参考坐标系重合。先将绕旋转角,再绕旋转角,最后绕旋转角。
- RPY旋转角。X-Y-Z固定角也可定义为RPY旋转角,即回转角(roll)、俯仰角(pitch)和偏转角(yaw)。首先将坐标系和已知参考坐标系重合。先将绕旋转 roll 角,再绕旋转 pitch 角,最后绕旋转 yaw 角。
乐白机器人的旋转姿态是用Z-Y-X欧拉角描述的。它们的关系如下:
当开发者需要在乐白的位姿和其他位姿表示法之间转换时,需要通过选择矩阵进行变换。一般计算机编程中常用RPY或四元组描述姿态,这里给出将RPY转为矩阵的公式:
给出将3×3旋转矩阵转为RPY的公式:
特殊地,当 时,。此时取 ,有 。
给出在KDL中的转换实现(C++):
Rotation Rotation::EulerZYX(double Alfa,double Beta,double Gamma) {
return RPY(Gamma,Beta,Alfa);
}
void Rotation::GetEulerZYX(double& Alfa,double& Beta,double& Gamma) const {
GetRPY(Gamma,Beta,Alfa);
}
Rotation Rotation::RPY(double roll,double pitch,double yaw) {
double ca1,cb1,cc1,sa1,sb1,sc1;
ca1 = cos(yaw); sa1 = sin(yaw);
cb1 = cos(pitch);sb1 = sin(pitch);
cc1 = cos(roll);sc1 = sin(roll);
return Rotation(ca1*cb1,ca1*sb1*sc1 - sa1*cc1,ca1*sb1*cc1 + sa1*sc1,
sa1*cb1,sa1*sb1*sc1 + ca1*cc1,sa1*sb1*cc1 - ca1*sc1,
-sb1,cb1*sc1,cb1*cc1);
}
// Gives back a rotation matrix specified with RPY convention
void Rotation::GetRPY(double& roll,double& pitch,double& yaw) const {
double epsilon=1E-12;
pitch = atan2(-data[6], sqrt( sqr(data[0]) +sqr(data[3]) ) );
if ( fabs(pitch) > (PI_2-epsilon) ) {
yaw = atan2( -data[1], data[4]);
roll = 0.0 ;
} else {
roll = atan2(data[7], data[8]);
yaw = atan2(data[3], data[0]);
}
}
机器人运动学
机器人运动,当指定关节位置时,只要不产生自干涉(即自己打到自己),理论上是可以达到任何位置的。当一组关节位置确定,以及TCP设置确定时,机器人的位姿也是确定且唯一的。这一计算过程即机器人正向运动学。
当指定空间位置时,情况就变得大不一样。由于机器人本身的构型,将空间位置转换为关节位置的机器人逆向运动学是多解或者无解的。机器人无法到达空间上任意一点,这是物理的限制。机器人也无法在空间两点之间任意地执行运动——这一现象在机器人处于「奇异位置」时尤其明显,此时执行空间移动命令很有可能导致算法运行失败,机器人不得不停止运动。
当机器人运动中出现如下错误提示时,请修改场景或程序中的运动命令,并通过示教或者关节移动将机器人恢复到正常位置。
D-H参数
乐白机器人使用改进的D-H参数对机器人进行运动学描述。
| 关节 | (单位:m) | (单位:m) | (单位:rad) | |
|---|---|---|---|---|
| 1 | 0 | 0.21583 | 0 | 0 |
| 2 | 0 | 0 | 0 | 1.5708 |
| 3 | 0 | 0 | -0.28 | 0 |
| 4 | 0 | 0.12063 | -0.26 | 0 |
| 5 | 0 | 0.09833 | 0 | 1.5708 |
| 6 | 0 | 0.08343 | 0 | -1.5708 |
由于制造、装配误差的存在,每台机器人的实际DH参数与理论值之间都会存在一定的偏差。乐白在每台机器人出厂前都会对实际DH参数进行精标,需要进行视觉抓取、离线仿真等应用的客户可以向开发人员咨询详细信息。
奇异位置
典型的奇异位置有如下三种:
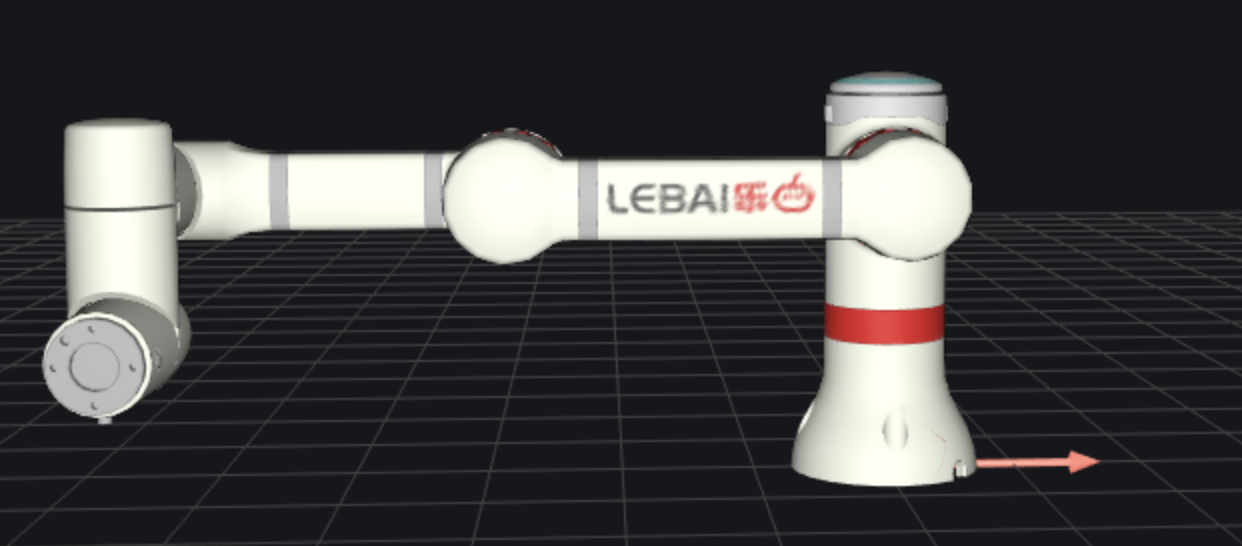
- 四轴平行,即第2、3、4、6关节处于平行状态。
- 零位,即机器人的所有关节角度都为0时。
- 机器人手臂在任何位置完全伸直时