产品信息
开箱
打开包装箱,取出机器人本体、控制箱、电源线、配件包等产品。
产品组成
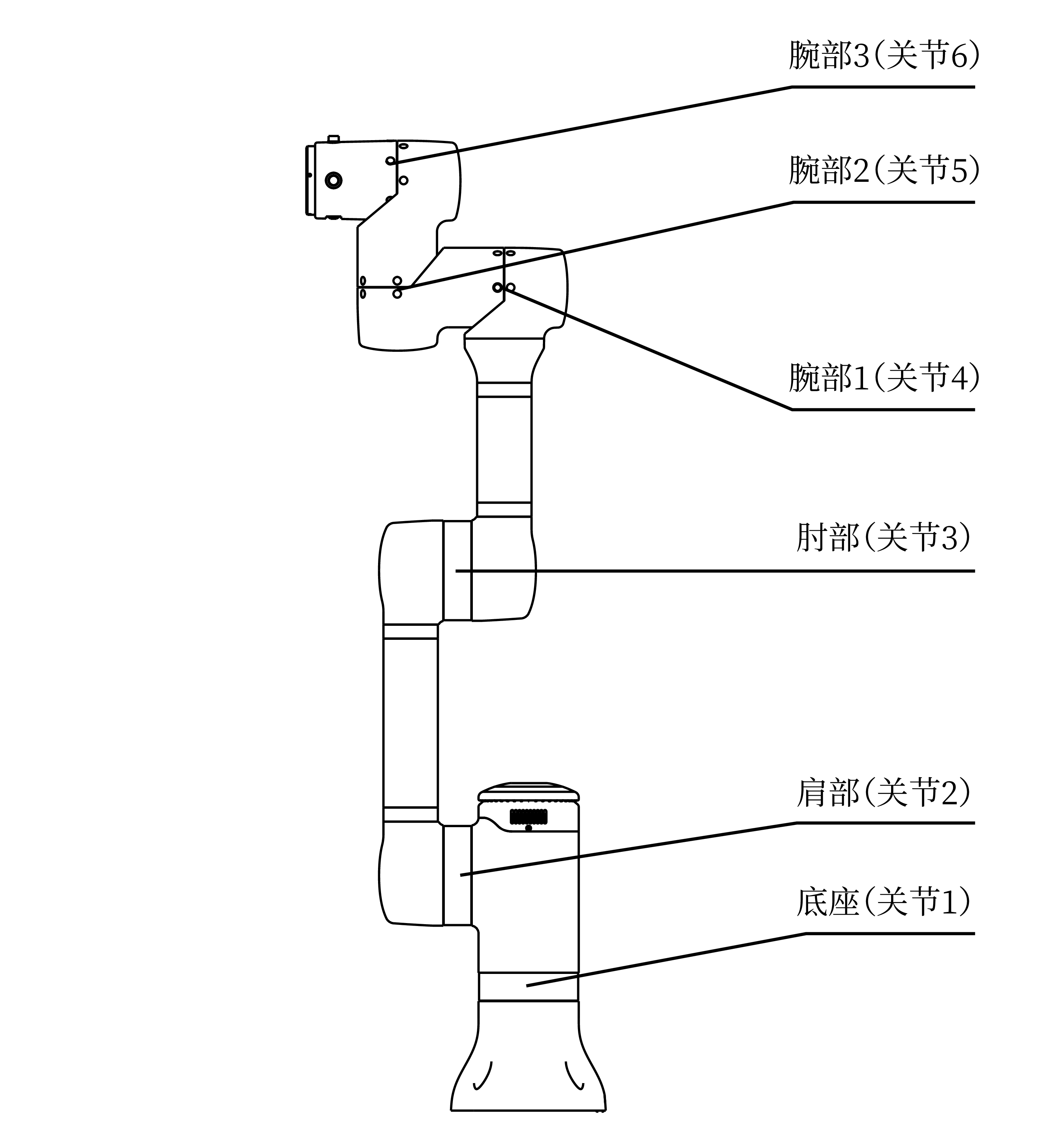
LM3 系列机器人产品主要由机器人本体和控制箱组成。机器人本体共有 6 个旋转关节,即 6 个自由度(DoF)。如图所示,机器人关节包括底座(关节 1)、肩部(关节 2)、肘部(关节 3)、腕部 1(关节 4)、腕部 2(关节 5)和腕部 3(关节 6)。
机器人本体(以下简称机器人)为机器人产品的执行机构,其中底座为机器人安装处,肩部和肘部可执行较大幅度动作,腕部 1 和腕部 2 可执行较精细动作,腕部 3 可以连接末端工具。
控制箱为机器人系统的控制部分,可控制机器人在工作空间中的位置、姿态,连接设备的电气输入和输出端。实际应用中为确保运行安全,通常需要在控制箱上外接急停开关(选配)。为方便使用,也可外接开关机按键(选配)。
如下图所示,控制箱通过机器人电缆与机器人连接。连接上电后(参见基础操作),用户可通过电脑、平板、手机或其他图形化终端设备的浏览器[1]访问机器人的 L Master[2]系统控制机器人,查看机器人的各种状态信息。

基础参数
机器人基础参数
| 自由度 | 6 | 工作半径 | 638 mm |
| 有效负载 | ≤ 3 kg | 重量 | 9.5 kg |
| 重复精度 | ± 0.5 mm | 末端速度 | ≤ 2 m/s |
| 环境湿度 | 25~85%(无冷凝) | 环境温度 | 0~40℃ |
| 防护等级 | IP54 | 供电电源 | 48 V (DC) |
| 安装方式 | 正装、倒装、侧装 | 安装面积 | 约 160 cm2 |
控制箱基础参数
| 尺寸 | 270×250×130(H) mm | 重量 | 3.8 kg |
| 供电电源 | 100~240 V (AC), 50~60 Hz | 电缆长度 | 2 m |
| 防护等级 | IP20 | 通讯协议 | 以太网 |
控制箱和机器人整机典型功耗 130 W。
控制箱电气规范
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 输入电压 | 100 | 220 | 240 | V (AC) |
| 外部市电保险丝(100~240 V 时) | 18 | 20 | 22 | A |
| 输入频率 | 47 | 50 | 63 | Hz |
| 额定工作功率 | 90 | 130 | 400 | W |
运动轴
LM3 机器人的关节运动范围是无限制的,见下表。
| 关节 | 运动范围 | 最大速度 |
|---|---|---|
| 关节1 | 无限制 | 180 °/s |
| 关节2 | 无限制 | 180 °/s |
| 关节3 | 无限制 | 180 °/s |
| 关节4 | 无限制 | 180 °/s |
| 关节5 | 无限制 | 180 °/s |
| 关节6 | 无限制 | 180 °/s |
以上所提的关节运动范围无限制需排除机器人自干涉的情况,自干涉的情况因实际运动场景而有差异。
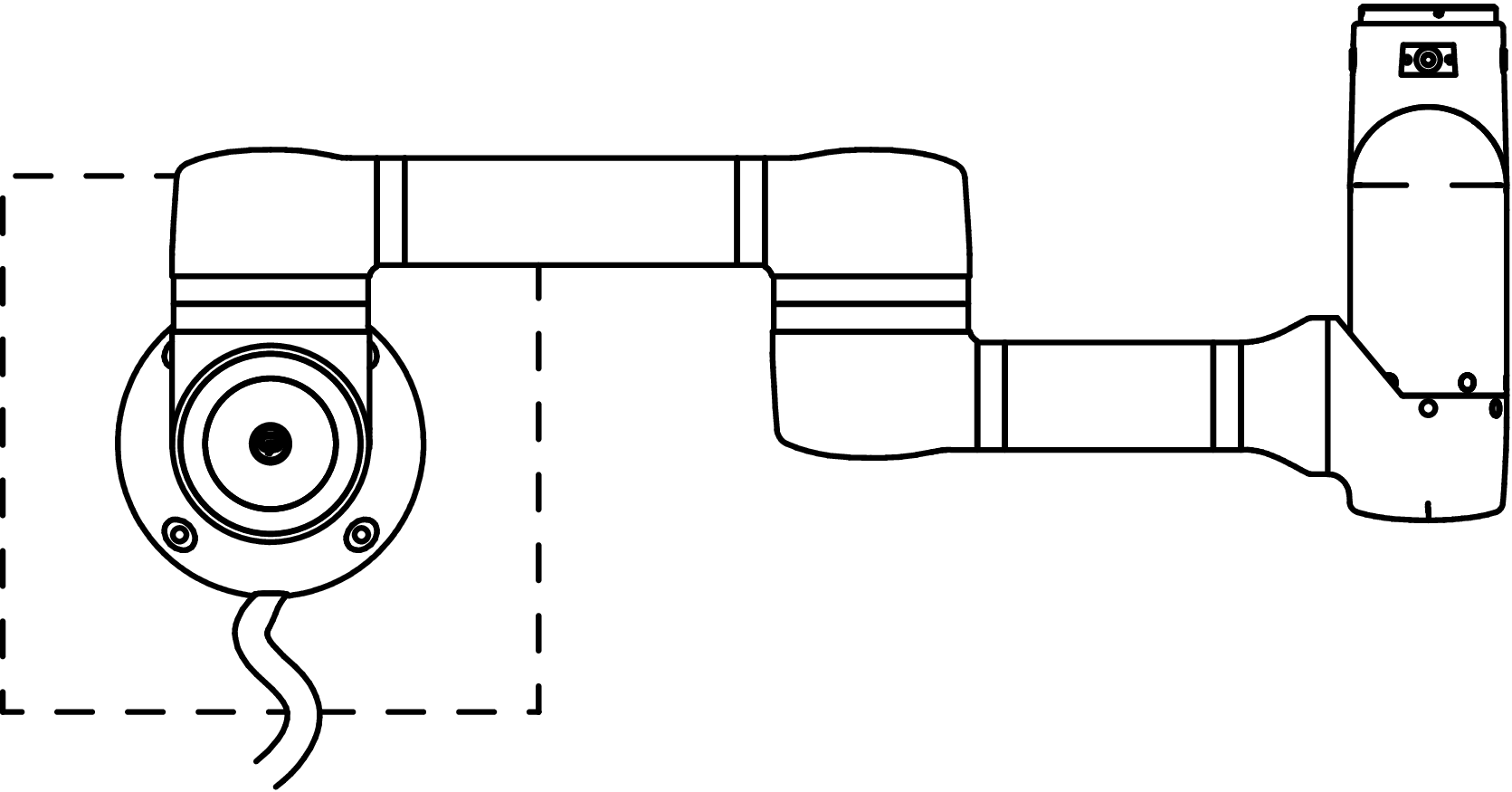
工作空间
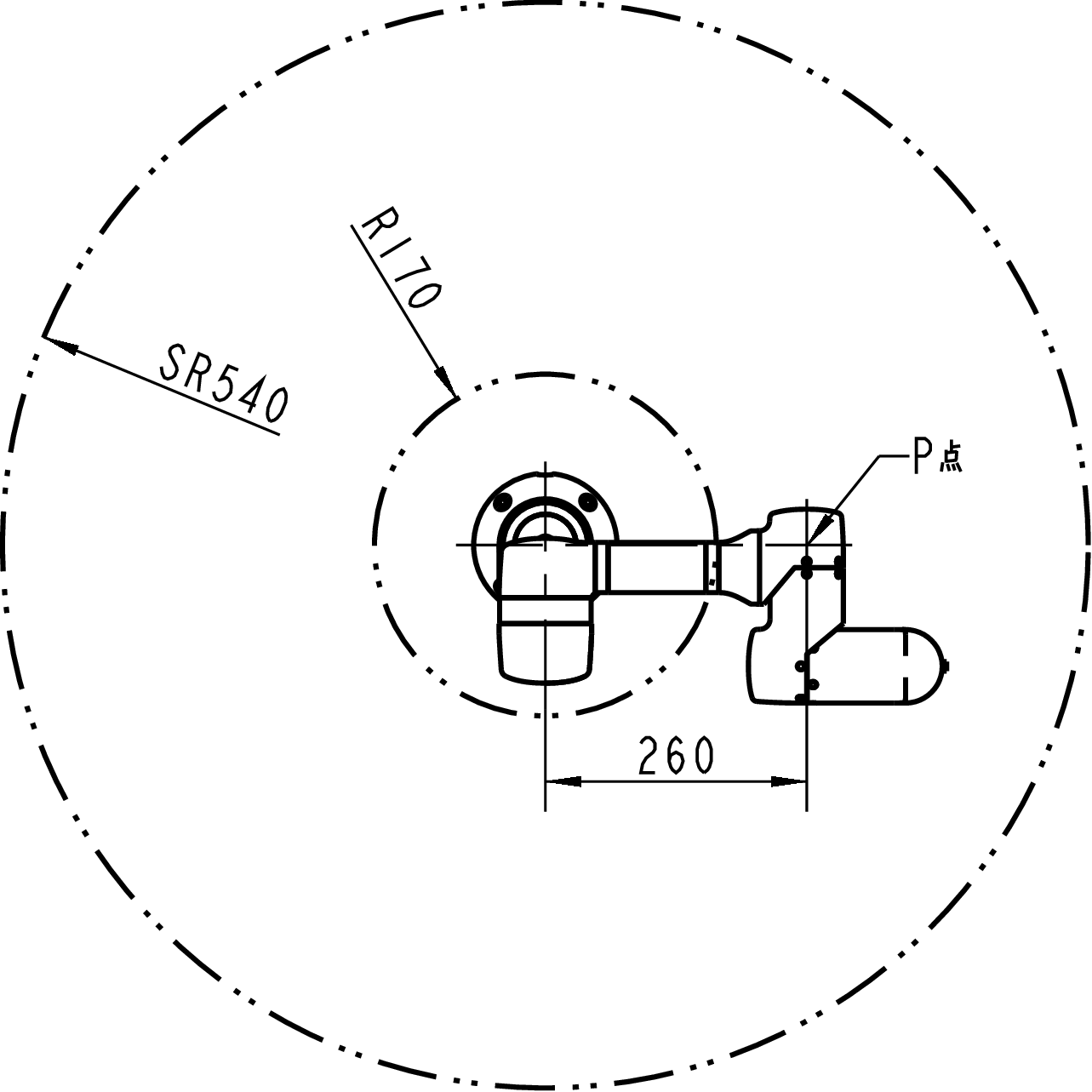
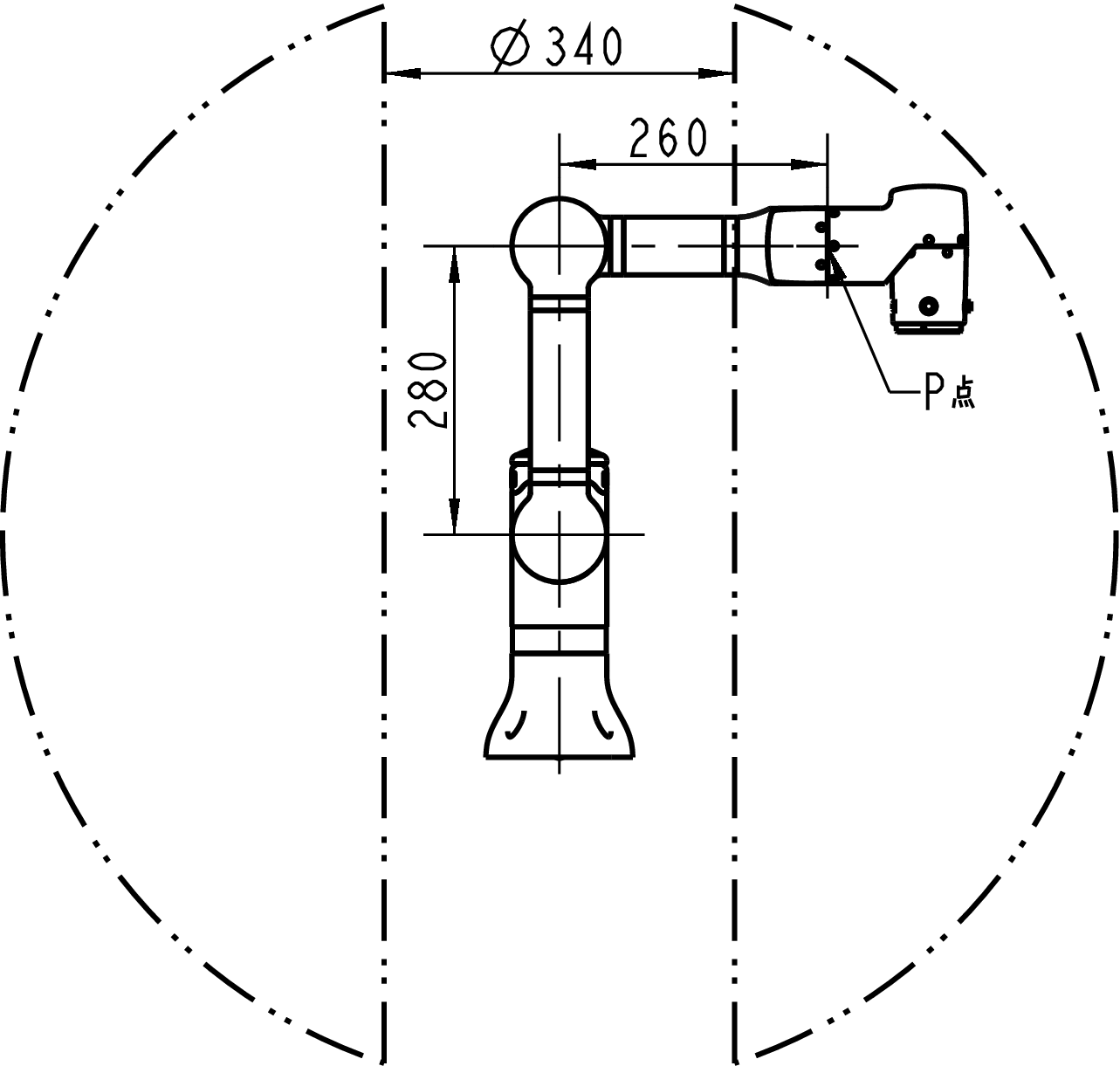
LM3 机器人的工作空间是指底座关节周围 540 mm 范围内的区域。
如上乐白机器人工作空间示意图,双点划线所示范围是 P 点的最佳运行区域。
I/O 接口
LM3 提供多种 I/O 接口。根据不同的应用场景,您可以选择不同位置的 I/O 接口来实现相应的 I/O 操作。
控制箱 I/O
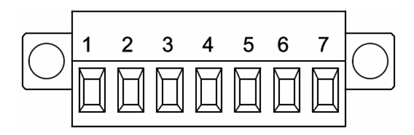
如下图表,机器人控制箱提供通过 DB15 公头接入的物理 I/O 接口:
- 4 个数字输入,4 个数字输出接口。
- 2 个模拟输入,2 个模拟输出接口。
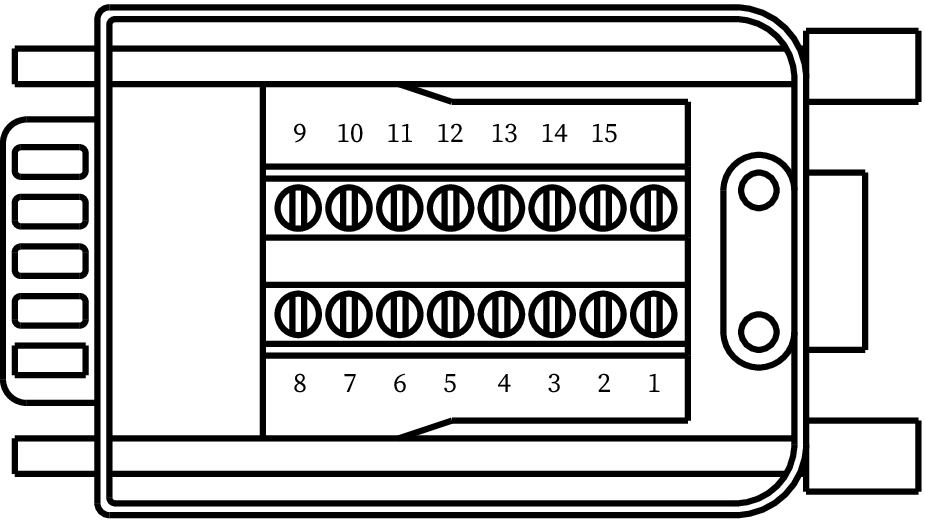
| 编号 | 接口 | 端口属性 | 编程示例 |
|---|---|---|---|
| 1 | 电源正极 | 24 V | |
| 2 | 模拟输出1 | AO 0 | set_ao(0, val) |
| 3 | 模拟输出2 | AO 1 | set_ao(1, val) |
| 4 | 数字输出1 | DO 0 | set_do(0, val) |
| 5 | 数字输出2 | DO 1 | set_do(1, val) |
| 6 | 数字输出3 | DO 2 | set_do(2, val) |
| 7 | 数字输出4 | DO 3 | set_do(3, val) |
| 8 | 电源负极 | - | |
| 9 | 模拟输入1 | AI 0 | get_ai(0) |
| 10 | 模拟输入2 | AI 1 | get_ai(1) |
| 11 | 数字输入1 | DI 0 | get_di(0) |
| 12 | 数字输入2 | DI 1 | get_di(1) |
| 13 | 数字输入3 | DI 2 | get_di(2) |
| 14 | 数字输入4 | DI 3 | get_di(3) |
| 15 | 电源负极 | - |
- 数字输入为 PNP 类型,输入电压 3~30 V。
- 数字输出为 PNP 类型,输出电压 24 V,4 个端口合计输出最大电流 2 A。
- 模拟输入/输出支持如下两种类型:
- 电压型:输入/输出电压 0~10 V。
- 电流型:输入/输出电流 4~20 mA。
法兰盘 I/O
如下图表,末端法兰盘上提供通过 SA810 接入的 I/O 接口:
- 2 个数字输入接口。
- 2 个数字输出接口。

| 编号 | 接口 | 端口属性 | 编程示例 |
|---|---|---|---|
| 1 | 电源正极 | 24 V | 最大供电电流 2 A |
| 2 | 电源负极 | ||
| 3 | 数字输出1 | FDO 0 | set_flange_do(0, val) |
| 4 | 数字输出2 | FDO 1 | set_flange_do(1, val) |
| 5 | EIA-485 A | RS485 D- | modbus.new_flange() |
| 6 | EIA-485 B | RS485 D+ | modbus.new_flange() |
| 7 | 数字输入1 | FDI 0 | get_flange_di(0) |
| 8 | 数字输入2 | FDI 1 | get_flange_di(1) |
- 数字输入为 PNP 类型,输入电压 3~30 V。
- 数字输出为 PNP 类型,输出电压 24 V,2 个端口合计输出最大电流 1.5 A。
不支持电压型或电流型的模拟输入/输出。支持在 RS485 接口上运行 Modbus/RTU 协议。
提示
在 LM6J 试产型号中,编号 5 和 6 对应的接口分别是 CANH 和 CANL。
新款的 LMG-90 夹爪仅支持在 LM3 型号通过 RS485 串口协议通信,不兼容 CAN 协议。
扩展 I/O
如果上述提供的输入输出接口不够用,可以在购买设备之前联系我们进行扩展 I/O 改造。
通讯接口
控制箱还提供不同协议的通讯接口:
| 编号 | 功能 | 性能参数 | 编程示例 |
|---|---|---|---|
| 1 | RS485A | 485 接口 A | serial.open("/dev/ttyS1") |
| 2 | RS485B | 485 接口 B | serial.open("/dev/ttyS1") |
| 3 | TX-232 | 232 接口发送 | serial.open("/dev/ttyS3") |
| 4 | RX-232 | 232 接口接收 | serial.open("/dev/ttyS3") |
| 5 | TX-TTL | TTL 信号发送 | serial.open("/dev/ttyS2") |
| 6 | RX-TTL | TTL 信号接收 | serial.open("/dev/ttyS2") |
| 7 | 信号地 |
网络连接
LM3 提供以太网、Wi-Fi(2.4 GHz) 热点网络、4G 蜂窝网络三种网络连接方式。控制箱上分别配有 RJ45 以太网接口(8P8C)、一对 Wi-Fi 天线和一根 4G 天线。
设备通过物联网连接上云,默认仅注册设备在线状态。当设备调试出现困难需要我们远程协助时,我们将征得您的同意,通过物联网平台连接到您的设备,查看设备信息并有可能修改您的设备配置。
提示
2020 年之前生产的批次没有预置 4G 物联网模块,也无法通过远程连接帮助您解决问题。如您需要进一步支持,可以联系我们的售后服务进行折价换新。
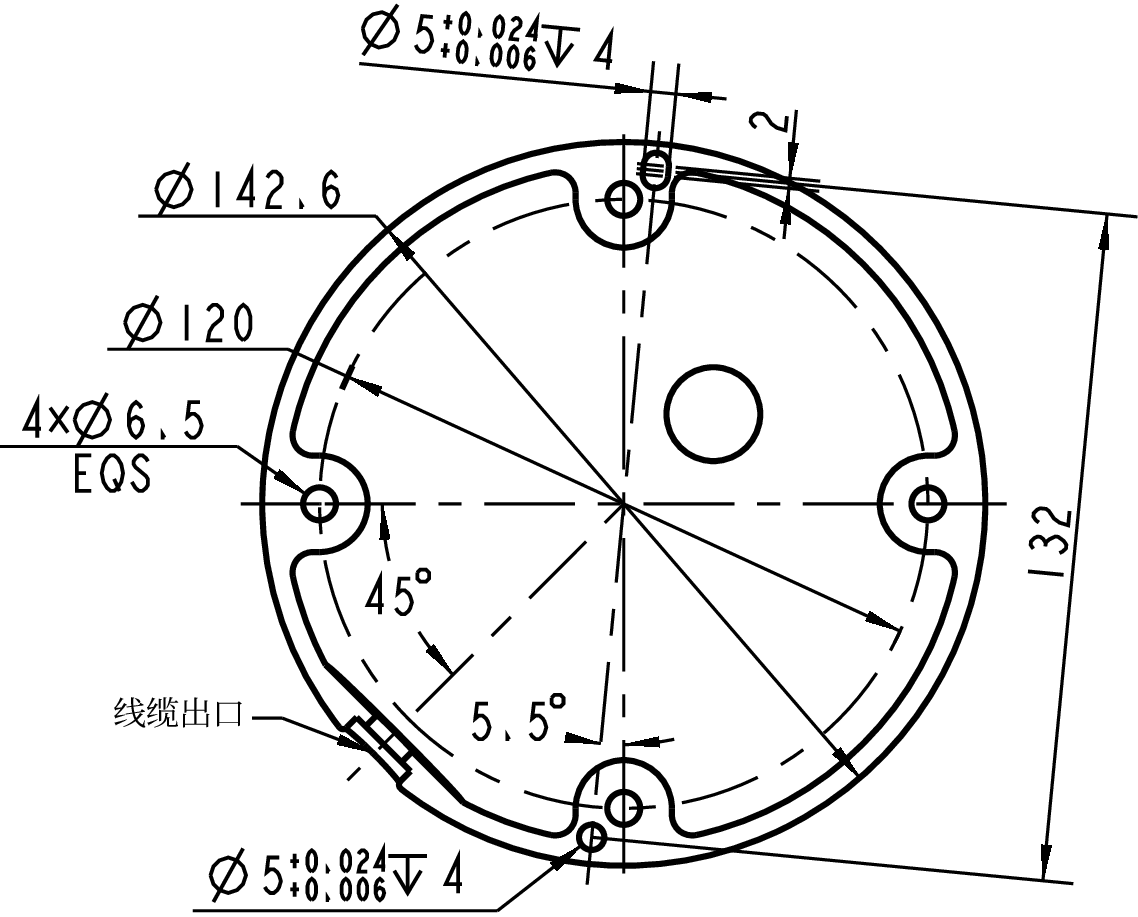
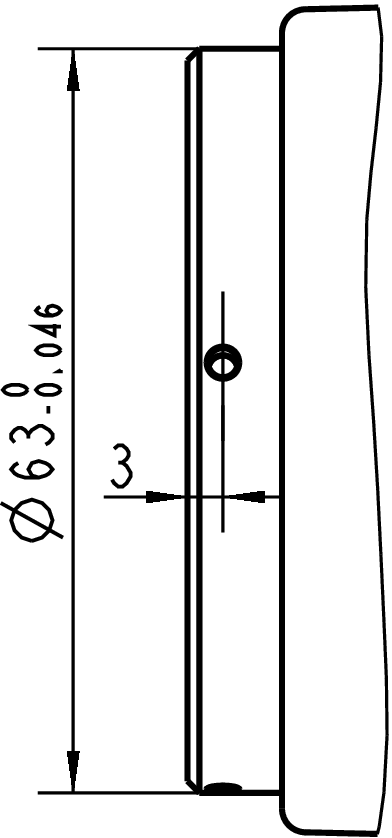
机器人安装
LM3 机器人支持三种安装方式:正装、倒装、侧装(侧装时注意机器人电缆出口必须朝下)。
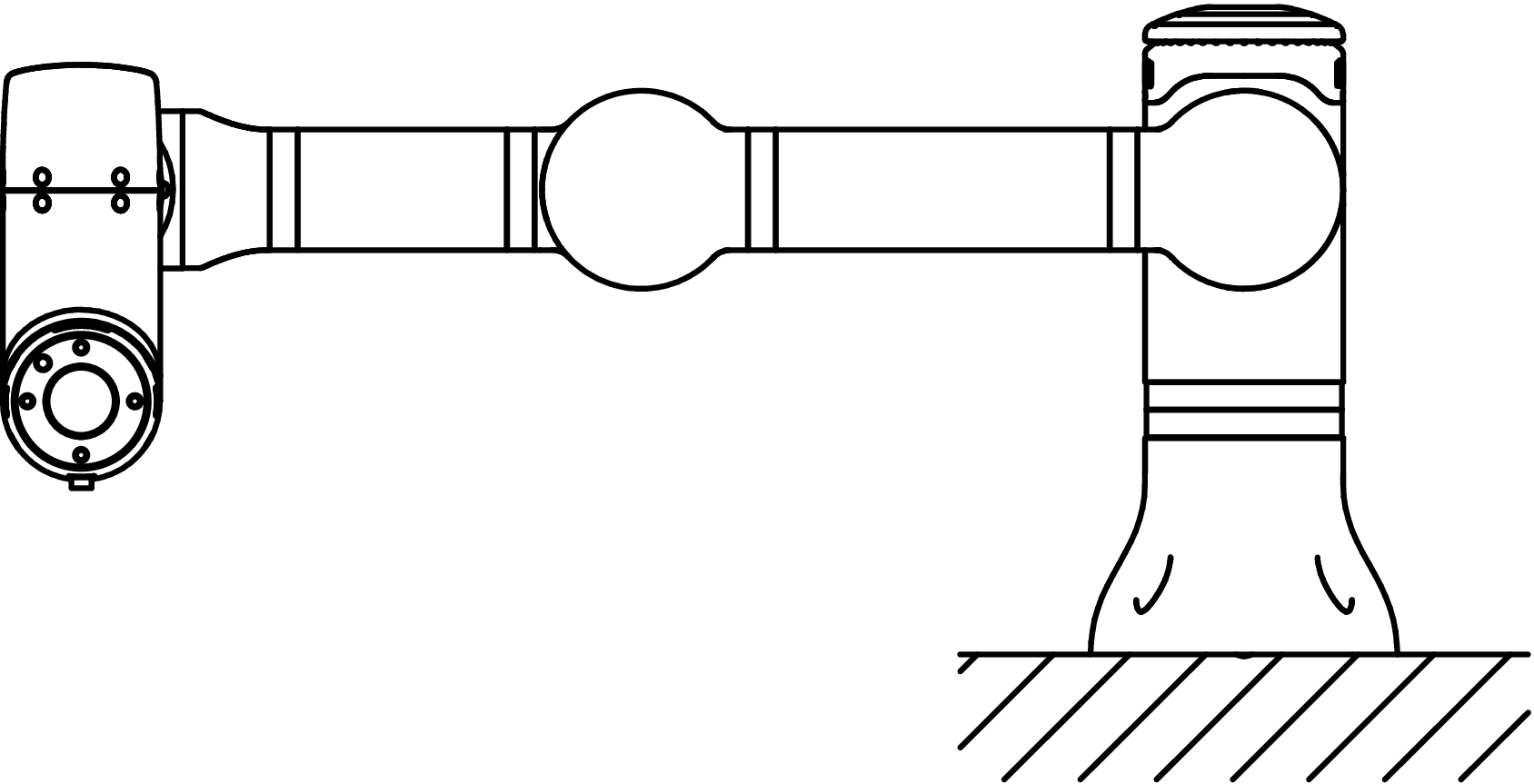
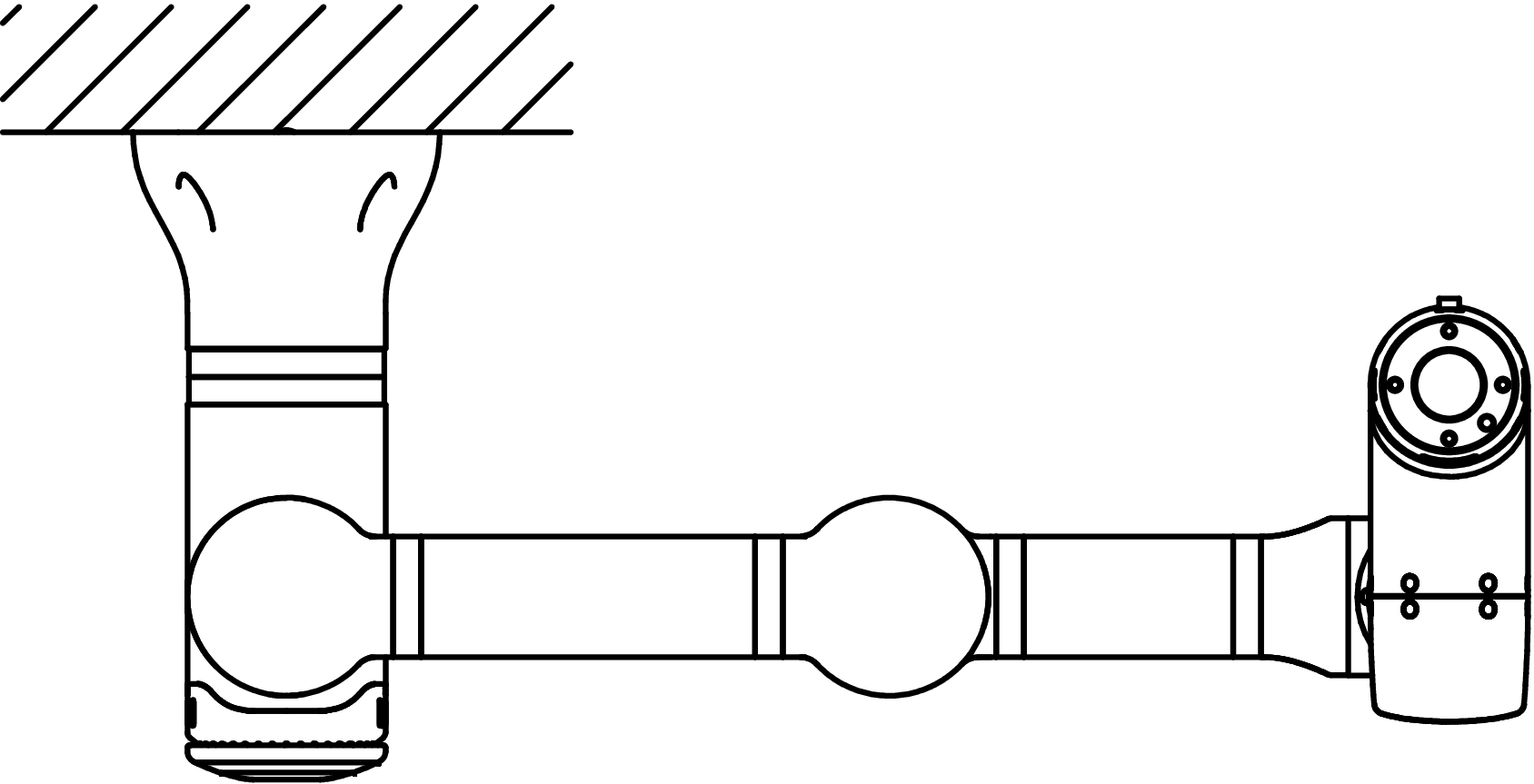
使用机器人配件包中的 4 颗 M6 螺钉,对应下图中机器人底座上的 4 个安装孔进行安装操作,建议以 9 N·m 扭矩紧固这些螺钉。
如果需要更准确地调整机器人位置,还可钻 2 个直径 5 mm 的孔并用销加以固定。
注意
- 机器人每一个安装孔位都应固定螺钉。
- 机器人安装时,应扶住机器人直至底座所有螺钉全部紧固好。
警告
切勿将机器人(含控制箱)固定在不稳固的位置,否则可能会跌落损坏。
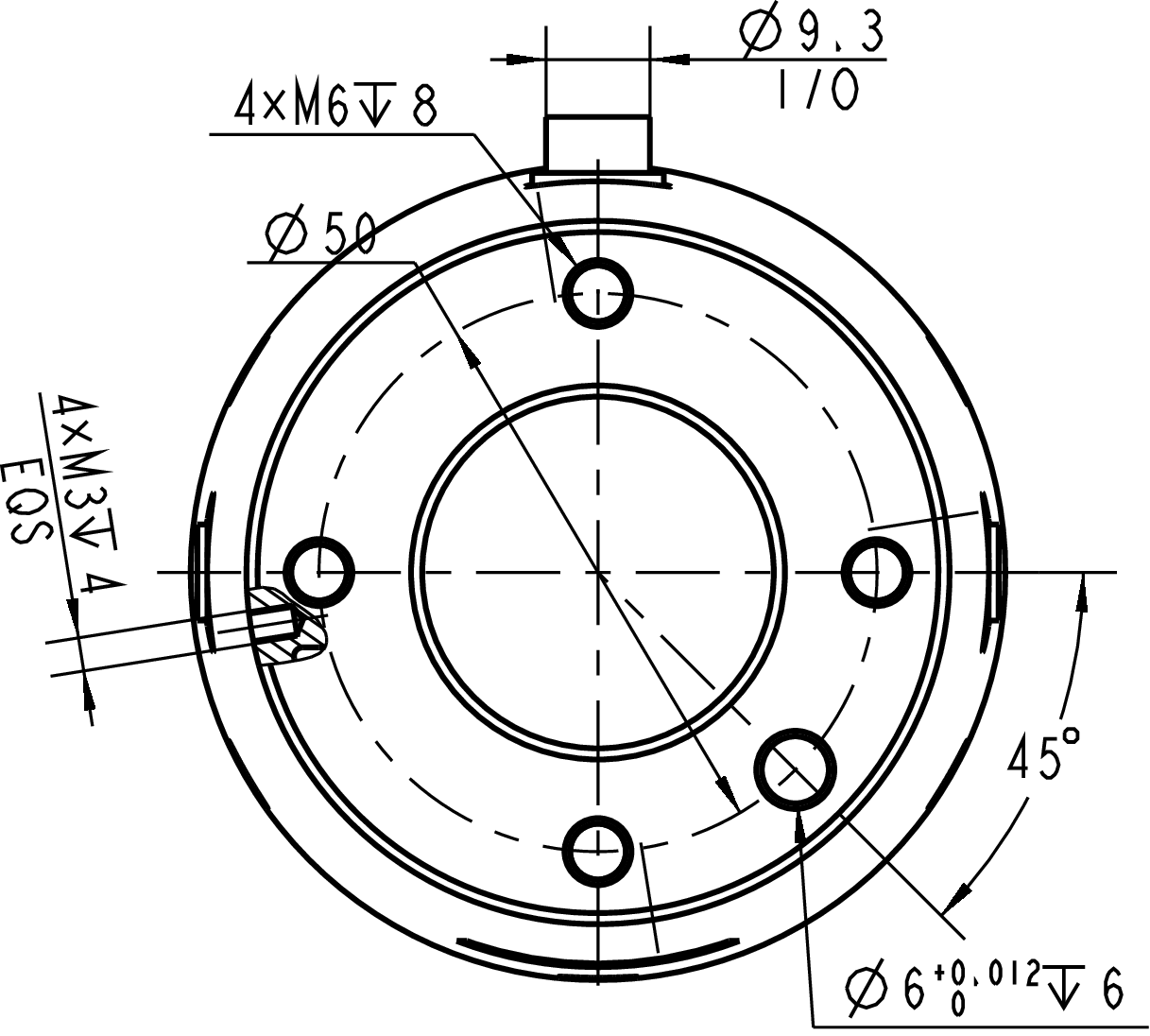
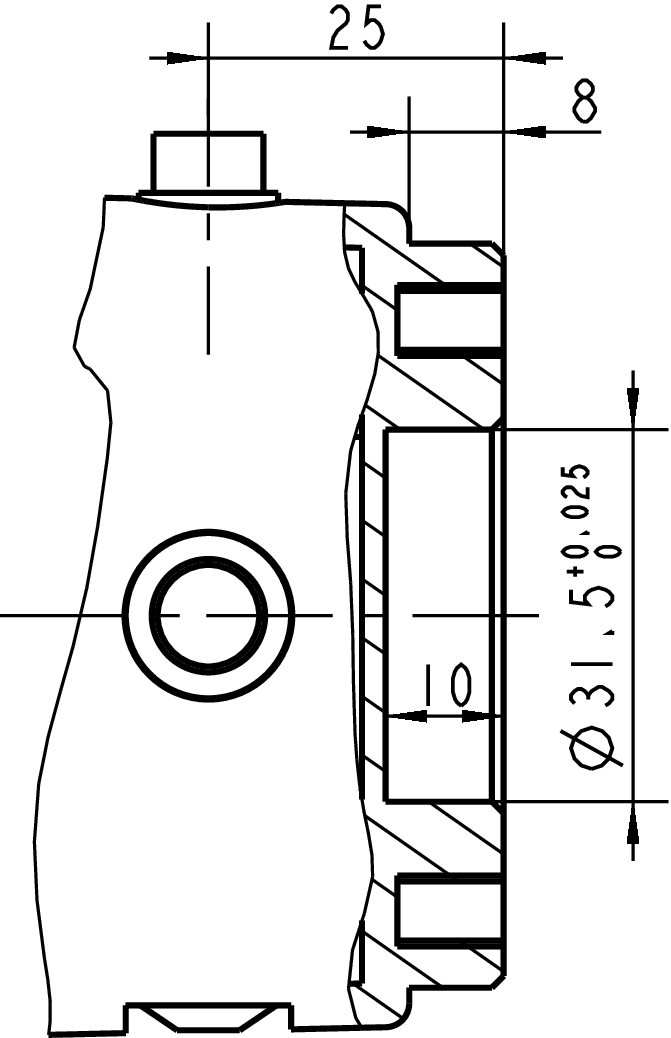
末端工具安装
如下图,机器人末端法兰盘正面有 4 个 M6 螺纹孔,用于连接末端工具与机器人;法兰盘侧面有 4 个 M3 螺纹孔,用于乐白轻量化末端工具的安装。正常使用且不包括受外界碰撞情况下,机器人末端(含工具)最大可承受 3 kg 负载。
有效负载
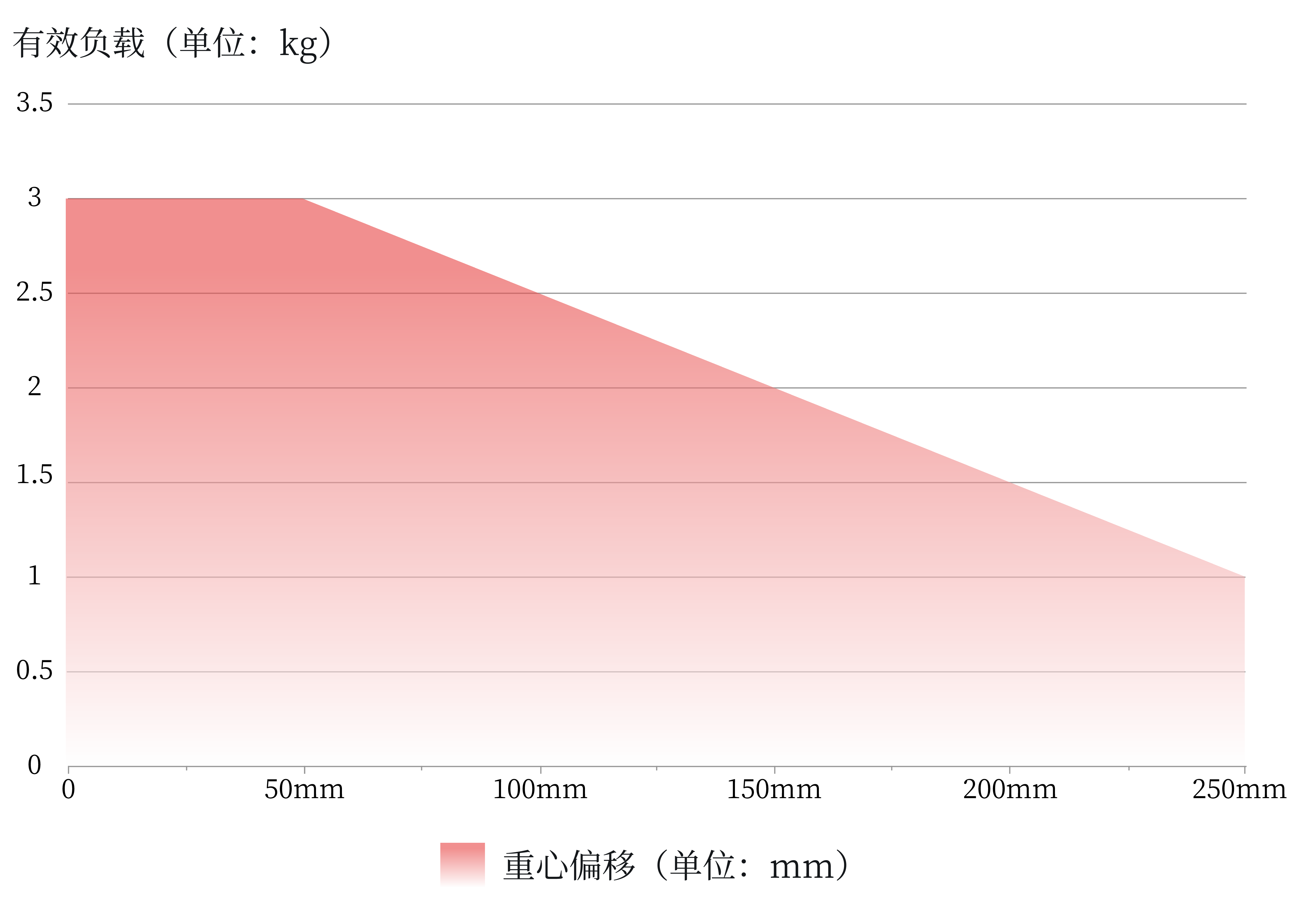
机器人最大允许有效负载取决于重心偏移,如上图。其中重心偏移定义为工具输出法兰端面的中心与重心之间沿法兰端面法向的距离。
警告
- 负载条件应在图表所示范围内。
- 图中显示的有效负载表示的是最大负载能力,在任何情况下,都不应该超过图中所示的最大重量。
- 超过允许值会导致机器内部件的提早损坏。